- 5개 실리콘 손가락 가진 로봇 손 등장…골격과 인대 구조까지 모방하려 연구 중
[한경비즈니스=진석용 LG경제연구원 책임연구원 ] 해마다 다양한 과일이 수확되는 여름이면 농촌의 일손 부족이 큰 고민거리로 부각된다. 농업용 로봇이 미래의 해결책으로 주목 받긴 하지만 아직 기술적 난제가 남아 있다. 산업계의 큰 관심을 받고 있는 로봇의 파지 기술도 그중 하나다. 인간의 손처럼 다양하고 정교한 동작을 할 수 있는 로봇 손이 있다면 로봇의 활용 영역은 훨씬 확장될 것이다. 오늘날 고난도의 동작도 해내는 로봇 팔처럼 로봇 손은 인간을 모방하는 방향으로 발전하고 있다.
반면 현재의 로봇이 인간보다 못한 점도 많다. 로봇은 여전히 인간만큼 정교한 작업을 수행하지 못하고 인간처럼 여러 가지 작업을 동시에 수행하지도 못한다. 특히 모양·크기·소재 등이 제각각 다른 물체들을 동시에 다루지 못한다. 예를 들어 공장에서 규격화된 부품을 다루던 로봇에 다른 규격의 물체를 맡기면 제대로 거머쥐지도 못한다. 또 기계 부품 등 단단한 물체를 다루던 로봇 손에 부드러운 물체를 다루게 하면 대상 물체를 파손시키기 마련이다. 심지어 각종 로봇 전시회에 가 보면 자사 기술의 우수성을 보여주려는 기업들이 샐러드용 채소를 다루는 작업을 시연하는 광경을 자주 볼 수 있다. 상용화된 로봇이 현실에서 맞닥뜨리는 가장 어려운 작업 중 하나가 부드러운 과일이나 채소를 다루는 일이기 때문이다. 로봇은 아직 딸기나 홍시처럼 연하고 부드러운 농작물을 손상시키지 않고 수확하거나 채소처럼 모양이 일정하지 않은 작물을 다듬고 세척하는 일을 하지 못한다. 모두 로봇이 물체의 속성에 맞춰 파지(grip)하고 조작(manipuilation)하지 못하기 때문이다.
로봇 손의 중요성
농업 현장과 물류 현장 등 로봇의 잠재적 수요처가 다양해지면서 로봇 기술 중에서 파지·조작 기술의 중요성이 커지고 있다. 파지·조작 기술이 로봇의 활동 영역을 좌우할 가능성이 높아지고 있기 때문이다. 로봇을 가장 적극적으로 활용하고 있는 기업인 아마존의 제프 베이조스 최고경영자(CEO)도 로봇 손의 중요성을 강조한 바 있다. 지난 6월 미국의 한 콘퍼런스에 참석한 베이조스 CEO는 휴머노이드가 대중화하려면 로봇 손이 더욱 발전해야 한다고 말한 바 있다. 로봇의 상용화 수준이 높아지려면 무엇보다 인간의 정교한 손동작을 모방할 수 있는 로봇 손이 있어야 한다는 것이다. 최근 개발이 가속화되고 있는 빈 피킹(bin-picking) 분야에서도 로봇 손은 중요한 역할을 담당한다. 대상물의 특성을 감지해 보다 섬세한 힘 조절을 통해 물체를 다루려면 시각 센서 못지않게 인간의 손처럼 섬세하고 정교하게 대상 물체를 파지하고 조작할 수 있는 로봇 손이 필수적이다.
인간의 신체 부위 중에서 최종적으로 물체를 다루는 역할은 팔이나 다리가 아닌 손이 맡듯이 로봇에서도 물체를 다루는 작업은 로봇 손(robot hand)인 엔드 이펙터(end effector)가 수행한다. 엔드 이펙터는 로봇 팔의 말단에 부착돼 손처럼 작동하는 기구부를 말한다. 엔드 이펙터는 작동 방식에 따라 여러 가지로 나뉜다. 절단·용접·도장과 같은 작업에는 각각 절단기·용접기·도료 분사기 등 전용 엔드 이펙터가 사용된다. 물체를 거머쥐고 다루는 파지·조작 작업에 사용되는 엔드 이펙터는 그리퍼(gripper)다. 그리퍼는 인간의 손에 가장 가까운 형태의 엔드 이펙터라고 볼 수 있다. 제조 현장에서 가장 많이 사용되는 그리퍼는 한 쌍 또는 두 쌍의 손가락이 대칭적으로 배열돼 있고 대칭적으로 동작하는 것이다. 현재 상용화된 그리퍼 유형의 로봇 손은 크기·형태·소재 등의 규격이나 속성이 동일한, 소위 정형화된 물체들을 다루는 작업만 할 수 있다. 그래서 많은 제조 공정들은 여전히 인간이 직접 작업해야 하는 수작업 영역으로 남아 있다.
로봇 개발자들에 따르면 로봇 손이 갖춰야 할 조건이 있다. 첫째, 로봇 손이 작업 대상물을 안정적으로 잡고 다루려면 일단 로봇의 자유도가 높을수록 유리하다. 로봇의 자유도는 로봇 손의 손가락 수와 각 손가락의 마디 관절 수로 볼 수 있다. 관절이 많은 손가락 여러 개가 함께 작동하면 다양한 동작을 할 수 있으므로 물체를 다루기도 쉽다는 것이다. 둘째, 로봇 손의 힘 제어도 정밀해야 한다. 쥐는 힘이 너무 약하면 물체를 잡지 못하고 반대로 지나치게 강하게 잡으면 대상 물체가 손상될 수 있기 때문이다. 마지막으로 물체와 직접 닿는 로봇 손의 표면 재질이 부드러운 소재일수록 더 유리하다. 접촉 부위가 부드러워야 작업 대상물의 표면을 손상시키지 않을 것이기 때문이다. 물론 물체를 놓치지 않도록 로봇 손의 표면은 마냥 부드럽기만 할 게 아니라 적절한 마찰력도 갖고 있어야 한다. 종합하면, 로봇 손의 궁극적인 목표는 인간의 손이라고 볼 수 있다. 구조적으로나 재질상으로 인간의 손이 다양한 작업을 하기에 적합하다고 볼 수 있기 때문이다.
로봇 손의 구조와 소재가 점차 발전하는 중
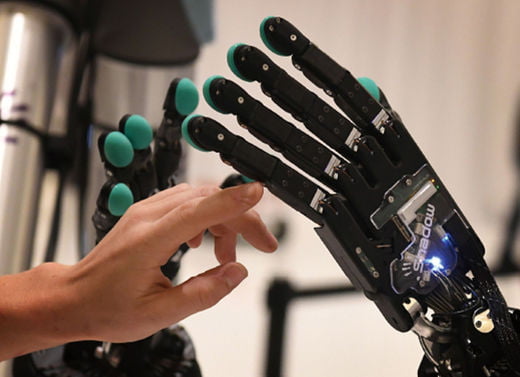
로봇 개발 초기부터 지금까지 꾸준히 개발돼 온 그리퍼 유형의 로봇 손은 금속·플라스틱 등 단단한 소재로 만들어진 것이 대부분이었다. 또 형태상으로는 두 개(또는 네 개)의 손가락을 가진 방식이 주류를 이뤘다.
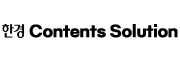
하지만 최근 개발되는 그리퍼들은 기존 방식과 다른 구조나 소재가 적용되고 있다. 구조 측면에서는 갈수록 그리퍼의 손가락 개수가 늘어나고 있다. 베를린기술대(TU베를린)가 개발하고 있는 로봇 손2(RBO Hand2)는 인간처럼 5개의 실리콘 손가락을 가진 로봇 손이다. 미국 라이트핸드로보틱스도 인간의 손과 유사한 형태의 로봇 손을 개발하고 있다. 미국 소프트로보틱스의 로봇 손은 부드러운 재질로 된 4개의 손가락의 형태를 지니고 있다.
또 부드러운 재질로 된 로봇 손의 개발 사례도 늘어나고 있다. 소프트한 로봇 손 중에는 단단한 금속 골격의 표면에 고무·실리콘과 각종 고분자 소재 등 부드러운 재질을 덮어씌운 것이 있는가 하면 골격 없이 부드러운 재질 자체로 만들어진 것도 있다. 매사추세츠공과대(MIT)의 인공지능(AI) 연구소에서 공개한 로봇 손은 신축성 전자 소자로 된 로봇용 스마트 장갑이다.
은실을 부착한 장갑을 로봇 손에 덮어씌운 다음 물체와 접촉하게 하면 장갑에 부착된 은실을 통해 접촉물과 장갑이 접촉하는 부분의 전기 저항 변화 수준을 감지해 물체의 형태와 무게를 알아내는 것이 스마트 장갑의 작동 원리다. 연구진에 따르면 테니스공 등 20여 가지의 물체를 거머쥐도록 하고 그 접촉 정보를 머신 러닝 방식의 AI로 분석해 물체의 인식 정확도를 89%까지 높였다고 한다. 국내에서도 다양한 기관들이 인간의 손과 유사한 로봇 손을 만들려는 연구·개발(R&D)을 추진하고 있다. 카이스트에서는 전기가 통하는 신축성 탄소 나노 튜브로 만든 인공 피부를 개발하고 있다. 카이스트의 로봇 손은 물체를 거머쥘 때 인공 피부의 구조가 변화하면서 발생하는 전류의 변화로 마찰력을 계산해 미끄러운 소재로 된 물체를 제대로 잡을 수 있다.
독일의 페스토는 바이오닉 소프트 핸드라는 이름의 로봇 손을 개발하고 있다. 바이오닉 소프트 핸드는 골격 없이 부드러운 재질로만 만들어진 로봇 손이다. 이런 유형의 로봇 손은 골격에 의존하는 구조의 로봇 손에 비해 움직임이 훨씬 유연하고 형태가 자유롭게 변형될 수 있으며 외부 충격에 강하다는 특징을 지닌다. 바이오닉 소프트 핸드는 공기압을 이용해 로봇 손의 움직임을 제어하는 방식이다. 사전에 물체를 다루는 법을 학습하고 손가락과 마디 끝에 촉각 센서를 부착해 동작을 감지하고 AI의 학습 능력을 이용해 인간의 손동작을 모방할 수도 있다.
소프트한 로봇 손 중에는 인간의 손과 전혀 다른 형태를 지닌 것도 있다. 하버드대와 MIT의 공동 연구팀이 개발 중인 로봇 손은 원뿔 모양의 종이 접기 마술 공에서 영감을 얻은 결과 독특한 외형을 지니고 있다. 대부분의 로봇 손이 소재에 무관하게 인간의 손과 닮은 모습을 지닌 것과 달리 평소에는 봉투 모습을 하고 있다가 물체를 집어 들기 위해 작동할 때는 원뿔 모양으로 접은 공처럼 보이게 된다. 오리가미(Origami) 로봇 손은 망치, 와인 잔이나 브로콜리, 작은 꽃 등 다양한 물체를 집어 올릴 수 있고 로봇 손보다 100배 무거운 물체도 들어 올릴 수 있다.
보다 발전한 로봇 손은 외형뿐만 아니라 골격과 인대 등의 구조까지 인간의 손을 모방한 것이다. 미래에 등장할 로봇 손은 외형이나 구조뿐만 아니라 동작까지도 인간의 손과 거의 흡사해질 가능성이 높다. 2016년 워싱턴대 연구팀이 공개했던 인간의 손이 로봇 손이 발전할 방향을 보여준 것이라고 볼 수 있다. 당시 공개된 로봇 손은 외형만 인간의 손을 닮은 것이 아니라 3D 프린터로 출력한 골격에 서보 모터 10개를 붙여 인대와 힘줄 역할을 하도록 해 보다 현실감 있게 인간 손의 움직임을 재현한 바 있다. 당시 연구팀은 로봇 손 표면을 생체 조직으로 덮어 외형상으로 거의 완벽한 인간 손을 재현할 계획을 공개했다. 향후에는 근전도·뇌파 등으로 작업 지시를 할 수 있도록 만들어 로봇 의수로 개발할 계획도 발표한 바 있다.
© 매거진한경, 무단전재 및 재배포 금지