-1970년 구소련 달탐사 로봇이 최초… 악조건 견딜 수 있고 경제적
[한경비즈니스=진석용 LG경제연구원 책임연구원] 로봇은 본래 인간이 하기에 어렵거나 위험한 일들을 대행하도록 만들어졌다. 가장 어려운 일을 수행하는 로봇의 대표 주자는 탐사 로봇이다.
우주를 배경으로 한 영화 ‘인터스텔라’에 등장했듯이 탐사 로봇의 활동 영역은 지구를 넘어 우주에까지 이른다. 2018년 11월 말에는 새로운 로봇들이 화성에 도착할 예정이다.
탐사 로봇의 형태는 활동 영역이나 용도에 따라 다양하다. 활동 영역에 따라서는 바퀴나 다리를 이용해 구르거나 걷는 지하용이나 육상용, 선박과 같은 형태의 수상용, 잠수정 타입의 수중용, 비행기나 회전익기와 같은 항공용, 진공이나 무중력 공간에서 작동하는 우주용 등으로 나뉜다.
로봇의 구조는 최종적으로 용도에 따라 결정된다. 파이프 등 좁은 공간에서는 뱀처럼 생긴 로봇이 활동하기에 유리하고 울퉁불퉁한 지형에서는 바퀴 대신 다리로 작동하는 거미나 말·유인원 등의 동물과 유사한 구조의 로봇이 적합하다.
다양한 탐사 로봇들 중 가장 최전선에서 활동하는 것은 우주탐사 로봇이다. 지구를 벗어나 머나먼 은하계까지 진출하고 있기 때문이다.
우주탐사에 로봇이 애용되는 이유는 첫째, 인간의 안전문제를 해결할 수 있기 때문이다. 섭씨 영하 270도의 저온이면서 치명적인 방사능이 쏟아지는 극한의 환경인 우주는 인간이 활동하기에는 최악의 공간이다.
하지만 로봇이 대신 간다면 안전사고 발생을 최소화할 수 있다. 둘째, 인간을 보내는 것보다 훨씬 저렴하기 때문이다. 화성 등 머나먼 곳으로 인간을 보내려면 물·식량·의약품·의복 및 각종 생활용품 등 장기간 인간의 생존을 보장할 대량의 물품을 함께 운송해야 한다.
그에 따라 우주선의 규모 역시 커져야 한다. 하지만 태양광 발전장치 등 자체 동력원을 내장한 로봇을 보내면 인간이 사용할 많은 물자와 연료 등 우주 왕복에 소요되는 제반 자원과 비용을 크게 줄일 수 있다. 셋째, 로봇은 인간과 달리 기약 없는 탐사 활동에도 투입할 수 있다.
태양계를 넘어 머나먼 은하를 탐사하는 것처럼 종료 시점이 정해지지 않은 탐사 활동은 육체적으로나 정신적으로 인간에게 어려운 일이다. 화성 탐사처럼 특정 행성에 거주하면서 진행해야 하는 장기간의 탐사 활동도 마찬가지다.
반면 로봇은 종료 시점이 없거나 장기간 진행되는 탐사를 수행할 수 있다. 고장 나거나 손상되지 않는 한 태양광발전 등을 통해 에너지만 확보할 수 있으면 로봇은 반영구적으로 작동하기 때문이다.
우주탐사 로봇에서는 특히 제어 방식과 동력원이 더욱 중요해진다. 달처럼 가까운 곳에는 원격조작할 수도 있겠지만 화성과 같은 원거리 탐사에는 원격으로 실시간 제어할 수 없으므로 스스로 장애물을 회피하거나 극복하는 자율주행 기능이 필수적이다. 또 대량의 연료를 보급할 수 없으므로 태양광 전지처럼 현지에서 지속적으로 조달할 수 있는 자원을 활용한 동력원도 필수적이다.
큰 범주의 탐사 로봇에 포함되는 인공위성이나 무인 탐사선을 제외하면 역사상 최초로 지구가 아닌 다른 천체에 착륙해 임무 수행에 성공한 탐사 로봇은 구소련의 ‘루노호트1(Lunokhod1)’라고 할 수 있다.
루노호트1은 엑스레이·레이저 광학 장비 등을 탑재하고 원격으로 조작되는 길이 2.3m의 로버(Rover)였다.
루노호트1은 1970년 11월~1971년 9월까지 약 10개월간 달 표면의 영상 수집과 지질 분석 등의 다양한 조사 활동을 수행했다. 루노호트1의 성공에 고무된 구소련은 1971년 과감하게 무게 4.5kg의 소형 로버 두 대를 화성으로 보냈다.
소형 로버 프롭엠(Prop-M)들은 화성 상공에 안전하게 도착했지만 한 대는 착륙 실패로, 한 대는 통신 두절로 임무 수행에 실패한 채 사라졌다. 이후 구소련은 1973년 루노호트2를 이용해 달 탐사에 다시 한 번 성공했다.
◆화성의 쌍둥이 로봇, 스피릿과 오퍼튜니티
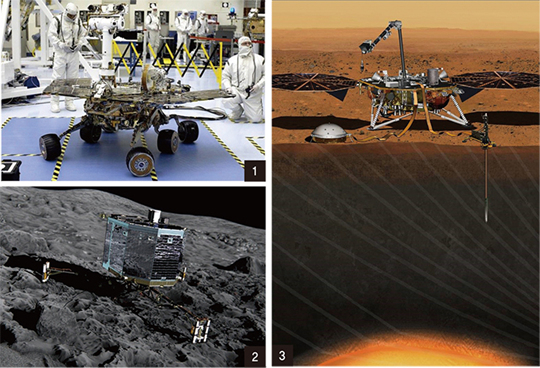
우주탐사 역사에서 가장 유명한 로봇들은 화성에서 탄생했다. 두 로봇의 정식 명칭은 MER(Mars Exploration Rover)-A, MER-B이지만 스피릿(Spirit)과 오퍼튜니티(Opportunity)란 애칭으로 더 많이 불린다.
스피릿과 오퍼튜니티는 높이 1.5m, 길이 2.3m, 무게 185kg에 태양광 축전지를 동력원으로 삼는 차륜형 로버다. 카메라·현미경·적외선 분석 장비 등의 탐사 장비를 갖춘 두 로봇이 화성으로 간 목적은 물과 생명체의 흔적을 찾는 것이었다.
화성의 쌍둥이라고 부를 수 있는 이 한 쌍의 로봇이 달성한 위대한 여행은 2004년부터 2018년 중반까지 예상 수명의 수십 배가 넘는 약 14년간 지속됐다.
2004년 1월 초 화성에 먼저 도착한 스피릿은 크레이터에 빠진 2009년 5월까지 예상 수명 90솔(Sol : 화성의 하루인 솔은 지구의 24시간 37분 23초)의 20배가 넘는 2208솔 동안 작동했다.
스피릿은 작동 기간 동안 메모리 에러와 통신 두절, 수십 번의 재부팅, 바퀴 고장 등 갖가지 악재를 극복하면서 탐사 활동을 한 것으로 유명하다.
2001년 1월 말 화성에 도착한 자매 로봇 오퍼튜니티는 산화철·아연·브롬 등 물의 단서가 되는 각종 물질을 발견해 물이 존재한다는 가설을 증명했고 뒤이어 물이 흘렀던 흔적까지 발견하는 성과를 달성했다. 오
퍼튜니티는 예상 수명을 훌쩍 넘어선 약 5400일 동안 작동했지만 2018년 6월 대형 모래 폭풍에 휩싸여 태양광 충전량이 부족해지면서 지금은 동면 모드에 들어가 있다.
로봇을 관리하는 미국항공우주국(NASA) 제트추진연구소(JPL)는 오퍼튜니티를 되살리려는 노력을 계속하고 있고 화성의 먼지가 걷히는 11월에서 1월 사이에 태양광 패널을 덮은 모래 먼지가 가시면 다시 살아날 가능성이 있다고 밝힌 바 있다.
화성 쌍둥이에 이어 2012년 8월 셋째 로버형 로봇 큐리오시티(Curiosity)도 화성에 도착해 탐사를 시작했다. 큐리오시티의 탐사 목적은 화성에서의 거주 가능성을 조사하기 위해 생명체의 증거를 탐사하는 것이었다.
2018년 11월 현재 새로운 로봇 인사이트(InSight : Interior Exploration using Seismic Investigations, Geodesy and Heat Transport)가 화성을 향해 가고 있다. 인사이트는 앞서 도착한 로봇들처럼 이동형 로버가 아니라 한 장소에 고정된 로봇이다.
인사이트의 임무는 화성 지각의 내부 구조와 3D 이미지를 분석해 화성 내부 지도를 만드는 것이다. 그래서 인사이트에는 화성의 지진 활동, 지표면 아래의 열 흐름 등을 관측하는 고감도 지진계와 열 유동 검사 장비 등과 함께 각종 장비들을 스스로 설치할 수 있는 로봇 팔도 설치돼 있다.
2014년 11월에는 태양계의 역사와 생명의 기원을 밝히기 위한 조사 임무를 맡은 유럽의 탐사 로봇이 최초로 혜성 착륙에 성공하는 기록을 남겼다.
2004년 우주 탐사선 로제타(Rosetta)에 실려 출발한 크기 1m, 무게 100kg의 정육각형 탐사 로봇 필레(Philae)는 약 11년간 65억km를 날아 혜성 표면 착륙에 성공했다.
혜성 사진 촬영과 토양 분석 등 기초 조사를 위해 각종 관측 장치를 갖춘 필레가 지름 4km에 불과한 소형 혜성 67P/추류모프-게라시멘코(67P/Churyumov·Gerasimenko)에 착륙하는 모습이 유럽우주국(ESA)을 통해 전 세계에 생중계되면서 우주탐사의 새 장을 열었다.
필레는 혜성 표면의 파노라마 사진을 지구로 송신하고 암석과 토양의 시료를 채취하는 등 주어진 탐사 임무를 충실히 수행했다.
하지만 계획된 착륙 지점을 벗어나 불시착하면서 태양전지 충전을 하지 못하게 된 필레는 탐사 60시간 만에 방전됐고 결국 실종됐다. 그러던 중 모선 로제타가 수명을 다하기 직전인 2016년 9월 혜성의 암벽 사이에 끼인 필레의 모습을 카메라에 찍어 보내면서 실종 후 2년 만에 필레의 마지막 모습이 관측됐다.
최근에는 또 다른 소행성에서 일본 탐사 로봇이 본격적인 탐사 활동을 시작했다. 2018년 9월 일본 우주항공연구개발기구(JAXA)는 폭 18cm, 높이 7cm, 무게 1kg인 실린더 형태의 소형 탐사 로봇 로버1A(Rover-1A)와 로버1B(Rover-1B)가 지구에서 2.8억km 떨어진 소행성 류구에 착륙했다고 발표했다.
두 로봇은 2014년 12월 발사된 소행성 탐사선인 하야부사2에 탑재된 컨테이너 미네르바 II1에 실려 약 32억km의 긴 여정 끝에 소행성 류구에 도착했다. 두 로봇은 소행성 표면의 사진과 온도를 측정하는 등 기초 조사를 진행할 계획인 것으로 알려진다.
◆미래에는 인간과 함께 탐사하는 로봇도 등장
지금까지 행성 전체의 영상이나 대기 데이터를 수집하는 탐사선 외에 직접 지상에 착륙해 작동하는 우주탐사 로봇들은 대부분 자동차와 같은 로버의 형태로 만들어지기 일쑤였다. 기술적 완성도나 에너지 효율성 측면에서 지표면을 이동하는 데 가장 효과적이기 때문이다.
하지만 다양한 사용 경험을 축적하면서 각국의 연구 기관들은 바퀴로 접근하기 힘든 험난한 지형에서도 작동할 수 있도록 팔과 다리를 사용하는 유인원이나 거미와 같은 구조의 로봇 개발을 진행하고 있다.
최근 NASA는 로버를 모선으로 삼고 군집 비행할 수 있는 꿀벌 로봇을 개발하고 있다. 매미 날개를 장착한 화성벌(MarsBees)이란 이름의 새로운 로봇은 로버 형태 로봇들이 작동하기 곤란한 울퉁불퉁한 지형에 구애 받지 않고 더 멀리 이동할 수 있어 탐사 범위를 훨씬 넓힐 수 있을 것으로 기대된다.
앞으로는 스피릿·오퍼튜니티·필레처럼 홀로 탐사하는 외로운 로봇들이 아니라 인간과 함께 활동하는 탐사 로봇들도 등장할 것으로 보인다. 달 탐사와 같은 수준의 우주탐사에는 우주비행사들이 참여할 수 있기 때문이다.
비록 상상이긴 하지만 영화 ‘인터스텔라’는 우주조종사들의 충실한 조력자로 활약하는 미래의 탐사 로봇이 어떤 활동을 할 수 있는지를 잘 묘사하고 있다. 로봇 타스(Tars)와 케이스(Case)는 우주선 조종에서부터 현장 조사까지 주인공의 모든 활동 과정에 마치 껌딱지처럼 동행해 다양한 지원 활동을 수행한다.
지구와 인접한 거리의 우주탐사에서 타스와 케이스 같은 로봇들이 인간을 도와 더 풍부하고 정확한 탐사 활동을 벌이는 순간이 그리 머지않은 미래가 될 수 있을 것이라고 상상해 보는 것도 큰 무리가 아닐 것이다.
[본 기사는 한경비즈니스 제 1197호(2018.11.05 ~ 2018.11.11) 기사입니다.]
© 매거진한경, 무단전재 및 재배포 금지